
Objective
XSpace is one of two of RIT Launch Initiative's "Space Race" teams. The Space Race teams were created primarily for new club members to learn the fundamentals of sport rocketry and to experience working together on a rocket development project throughout the academic year. Each Space Race team consisted of 8-12 members, each of who contributes to a certain part of the team's rocket design.
Both RIT Launch Initiative Space Race teams were tasked with building a National Association of Rocketry (NAR), High Power Rocketry (HPR) Level 2 model rocket. The rocket must meet the following requirements:
XSpace is one of two of RIT Launch Initiative's "Space Race" teams. The Space Race teams were created primarily for new club members to learn the fundamentals of sport rocketry and to experience working together on a rocket development project throughout the academic year. Each Space Race team consisted of 8-12 members, each of who contributes to a certain part of the team's rocket design.
Both RIT Launch Initiative Space Race teams were tasked with building a National Association of Rocketry (NAR), High Power Rocketry (HPR) Level 2 model rocket. The rocket must meet the following requirements:
- Cesaroni 6 Grain XL Motor Casing
- Off-the-shelf motor
- Minimum altitude of 5000ft
- Minimum factor of safety of 3.0
- Minimum stability of 2.5
Fool's Journey Overview
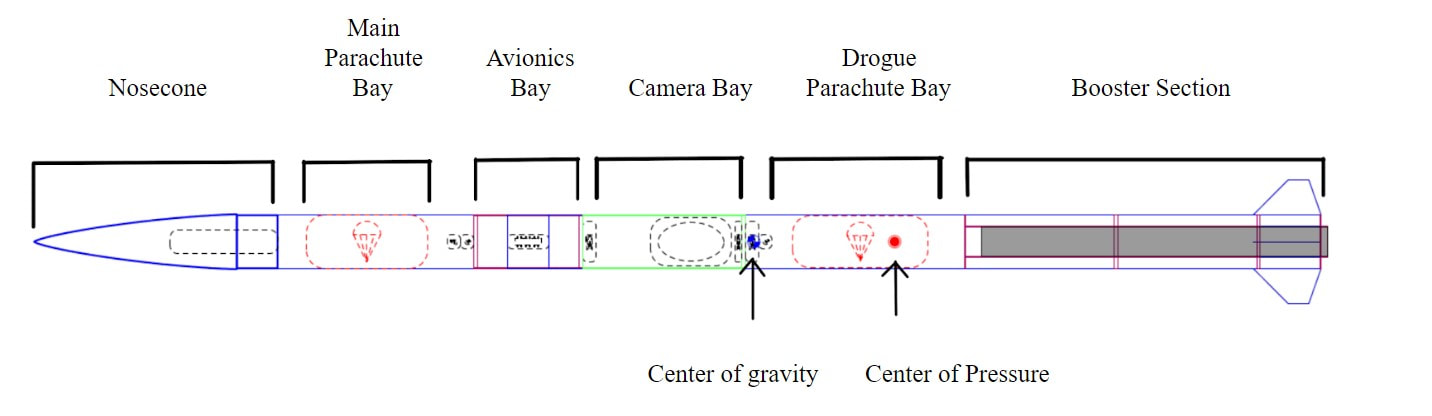
Fool’s Journey is an 8-foot-tall National Association of Rocketry Level 2 high-powered rocket. The rocket body is broken into two main sections, and is made entirely from bluetube. The lower section of the rocket contains 3 subsections, which are the booster, camera bay, and avionics bay. The camera bay is held between the avionics and booster. The drogue parachute is also held in the lower section, between the booster and the camera bay. The avionics bay connects the lower structure to the upper section of the rocket, which contains the main parachute. The nose cone sits at the top of the rocket. The booster holds a Cesaroni L640 6 grain motor, which is held in by an inner tube and engine block. The rocket uses a dual-deploy recovery system, which uses black powder charges to initiate deploy. A 2.5-foot drogue parachute and a 6-foot main parachute will be deployed to allow for slowed descent and safe landing.
Payload
The payload of this rocket is a Nikon KeyMission 360-degree camera that will be deployed at apogee with its own parachute. This parachute attaches to a custom 3D-printed camera holder to allow for safe landing. The camera is also paired with its own EggFinder TX Global Positioning System (GPS) that will allow for the camera to be found after landing. In addition to the camera, the rocket is equipped with an Eggtimer Quantum flight computer and Eggfinder GPS flight computer. These devices will send GPS data from the onboard circuit to a ground receiver for real time tracking.
Aerostructures
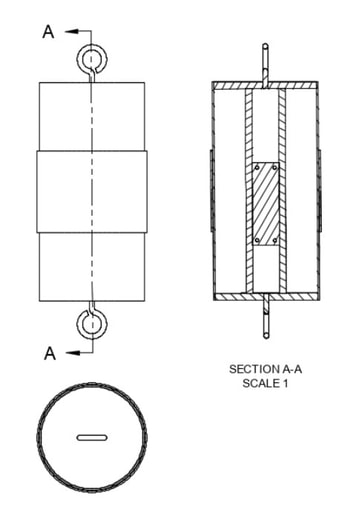
The force plate, located at the bottom of the booster section body tube, acts as a centering ring and is the most important structural member of the booster section. The purpose of the force plate is to prevent the motor from flying through the rocket at lift off. The plate’s outer diameter is equal to that of the body tube; the purpose of this is to transfer all stresses to the body tube as opposed to depending on the shear strength of epoxy between the inner body tube and a typical centering ring. The inner diameter is equal to that of the inner tube housing the motor. The plate is epoxied to the inner tube, and the amount of epoxy at this interface is chosen so that it supports the entire thrust load of the rocket in shear. G5000 RocketPoxy was used due to its extremely high shear strength. However, should the epoxy fail, the aft closure on the motor will collide with the thrust plate and prevent the motor from going up through the rocket. The plate is made of aluminum, which was chosen due to its strength-to-weight ratio, low cost, and ease of manufacturing.
|

|

|
Finished Rocket

|

|
Team Members
Justin Silva - Project Manager
Aubrey Figoras
Alexander Yovanovich
Derek Basta
Derek Labasi
James May
Kevin McDonough
Ryan Brown
Sarah Rosen
Justin Silva - Project Manager
Aubrey Figoras
Alexander Yovanovich
Derek Basta
Derek Labasi
James May
Kevin McDonough
Ryan Brown
Sarah Rosen